-
솔리톤(Soliton)지도교수오규태
-
목적
유비쿼터스 구현을 위한 핵심 기술인 좌표 인식 기술과 영상전송 기술에 대한 원천 기술을 마이크로 컨트롤러를 이용한 작품 제작을 통해 습득하게 하며 향후 유비쿼터스 시대에 핵심 기술을 보유한 전문기술인으로 양성
-
운영방안
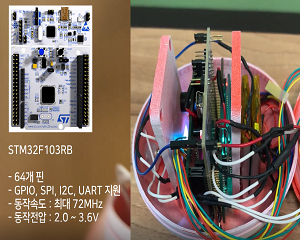
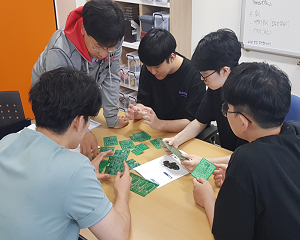
- 마이크로컨트롤러를 이용한 다양한 산업용 디바이스를 제작하고, 학과에서 교육하는 AVR, ARM 프로세서를 실무적으로 실습
- AVR, ARM프로세서, C언어에 대한 교육은 수업시간에 이루어지며 동아리 활동을 통해 실무 경험을 축척하는 교육
-
활동사항
- 8051 마이크로프로세서 연구 및 실습
- 시리얼 포트 컨트롤 기법 연구 및 실습
- Zigbee 전송기술 연구 및 실습 - TCP/IP 프로토콜 연구
- 페러렐 포트 컨트롤 기법 연구 및 실습
- 적외선 통신 기술 연구 및 실습


-
목적
-
TesLa지도교수임경원
-
목적
4차 산업 시대에 산업계에 크게 영향을 미칠 수 있는 기반 기술로서 AI 관련 기술 역량을 갖춘 인재 양성
-
운영방안
자율 주행 자동차 플랫폼 상에서 영상/센서 신호 인식, 주행 제어등 AI기술을 습득하고 임베디드시스템 및 다양한 기기의 제어에 응용할 수 있도록 기초 능력을 배양
-
활동사항
- AI 활용 기술 (Nvidia 플랫폼, AI 기반 물체 인식 및 주행제어 기술) 강좌를 통한 기반 기술 습득
- Python, Tensorflow등 AI 기초 언어 환경 및 ROS 환경 습득
- 물체 인식 및 주행 알고리즘 구현, 주행체 제작
- 자율 주행 외부 경진대회 참가

-
목적